
Robot hình con cua bé hơn một con bọ chét này cực kỳ cơ động, nó có thể uốn cong, xoắn, bò, đi, quay và thậm chí là nhảy. Nghiên cứu được công bố trên tạp chí Science Robotics và mở ra cơ hội cho nhiều ứng dụng hữu ích trong tương lai.
Robot siêu nhỏ chuyển động với sự trợ giúp của tia laser
Lấy cảm hứng từ sách hình nổi của trẻ em
Người đứng đầu công trình nghiên cứu trên là nhà khoa học John A.Rogers. Ông cho biết, robot là một lĩnh vực nghiên cứu thú vị và sự phát triển của robot với kích thước siêu nhỏ (microrobot) là một chủ đề hấp dẫn để khám phá.
Theo người phụ trách vấn đề lý thuyết của công trình là ông Yonggang Huang, họ đã nắm trong tay công nghệ để kiểm soát nhiều phương thức chuyển động của robot siêu nhỏ trên. Tuy nhiên, robot này chuyển động chậm hơn nhiều so với một con bọ chét và mỗi giây nó đi được quãng đường bằng một nửa chiều dài cơ thể của mình.
Ông Yonggang Huang cho rằng, việc đạt được khả năng như vậy ở một robot đi bộ siêu nhỏ là một thách thức rất lớn. Nhưng giờ đây họ có thể chế tạo robot biết đi theo bất kỳ kích cỡ hay hình dạng 3D nào.
Để tạo ra một sinh vật nhỏ với chiều rộng nửa milimet như vậy, ông Rogers và Huang đã chuyển sang một kỹ thuật mà họ giới thiệu cách đây 8 năm. Đó là phương pháp lắp ráp lấy cảm hứng từ cuốn sách hình nổi của trẻ em.
Đầu tiên, nhóm nghiên cứu chế tạo phiên bản ban đầu của cấu trúc cua đi bộ ở dạng hình học phẳng. Sau đó, họ dính cấu trúc này vào một đế cao su hơi kéo căng. Khi lớp nền căng được thả lỏng, một quá trình xô lệch có kiểm soát diễn ra khiến con cua “bật lên” thành các dạng 3 chiều được xác định chính xác.

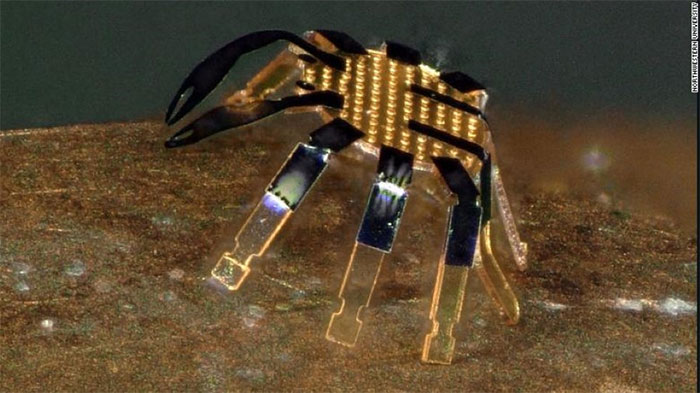
Robot con cua nhỏ hơn độ dày của đồng xu
Robot siêu nhỏ hình con cua và nhỏ hơn độ dày của đồng xu trên không chạy bằng phần cứng phức tạp, bằng thủy lực hay điện. Thay vào đó, sức mạnh của nó nằm ở khả năng đàn hồi của cơ thể.
Các nhà khoa học sử dụng vật liệu “hợp kim nhớ hình” có khả năng ghi nhớ hình dạng ban đầu để có thể biến đổi thành hình dạng “được ghi nhớ” khi được tác dụng nhiệt.
Trong trường hợp này, các nhà nghiên cứu sử dụng một chùm tia laser chiếu vào để làm nóng nhanh robot tại các vị trí được nhắm mục tiêu khác nhau trên mình chúng.
Một lớp phủ thủy tinh mỏng có tính đàn hồi sẽ giúp bộ phận của con robot trở về hình dạng ban đầu khi được làm mát. Các chân của robot có thể được bẻ cong để nó có thể đứng lên. Nó sẽ đứng trên chân của mình cho tới khi nhiệt độ khiến nó chuyển động.
Khi robot trên thay đổi từ giai đoạn chuyển động này sang giai đoạn chuyển động khác, tức là biến thành hình dạng đã ghi nhớ và lặp đi lặp lại, nó tạo ra chuyển động.
Tia laser được sử dụng để đưa nhiệt độ vào các vùng khác nhau của robot giúp nó có thể di chuyển. Loại tia này không chỉ điều khiển từ xa để kích hoạt robot mà còn xác định hướng đi của nó. Ví dụ, quét tia laser từ trái sang phải sẽ khiến robot di chuyển theo.
Ông Rogers giải thích, bởi những cấu trúc này rất nhỏ nên tốc độ làm mát rất nhanh. Điều này khiến robot phản ứng nhanh đáng kinh ngạc ngay cả với tốc độ lên đến 10 chu kỳ mỗi giây. Trong khi đó, việc giảm kích thước của những robot này cho phép chúng chạy nhanh hơn.

Những con robot nhỏ bé được chế tạo bằng kỹ thuật lấy cảm hứng từ những cuốn sách hình nổi của trẻ em.
Với phương pháp này, nhóm các nhà khoa học ở Đại học Northwestern có thể phát triển các robot với nhiều hình dạng và kích thước khác nhau. Trong quá trình chế tạo, họ cho sinh viên ở nhiều cấp độ của mình tham gia.
Những ý tưởng đã được kết hợp lại để tạo ra robot với nhiều dạng con vật. Một số sinh viên hứng thú với chuyển động bò ngang của con cua nên robot cua đã ra đời với khả năng xoắn, lật, nhảy.
Mặc dù nghiên cứu hiện đang mang tính khám phá và tạo ra vì mục đích học thuật, nhưng các nhà khoa học tin rằng công nghệ của họ có tiềm năng đưa lĩnh vực này đến gần hơn với việc tạo ra các robot siêu nhỏ, đảm nhận các nhiệm vụ ở những không gian hạn chế.




Thông tin liên hệ
bbtvntv@gmail.com
Copyright 2020 by VNTV
vietnamthinhvuong.com
thinhvuongvietnam.com